![]()
来源:军鹰资讯
任务规划是作战指挥及控制的核心,特别是随着联合作战理念的提出与深入,任务规划技术作为传统手段与新兴技术的最佳结合点,正逐步成为解决未来智能化战争的关键所在.为了能充分利用该领域内已有的成熟技术成果,并开展更深入的探索,详细分析了任务规划技术的发展现状以及技术路线,对未来的研究方向作了展望.
任务规划(Mission
Planning)军事领域的正式定义在《中国人民解放军军语》、《中国人民解放军空军军语》和《美军军语及相关术语词典》里没有明确的定义和解释.国内有学者认为任务规划是一项基于可信的模型和数据,按照标准化作业流程,对作战要素进行全面分析,实现优化配置各类作战资源,整体协调各类兵力兵器的行动计划,可根据战场态势的变化进行实时动态调整,确保以最优或近似最优的方法达成作战目标的作战指挥决策活动,是C4ISR系统的一项重要功能[1];也有学者认为任务规划是围绕任务目标制定\优化作战方案的一种思维活动过程[2].
目前军事界和理论界对任务规划还未形成比较统一的认识.笔者经过对各种任务规划定义的综合分析,给出任务规划在武器装备领域的一般定义:任务规划是将武器装备、战场环境和人系统映射到统一的数学空间,运用数学工具和现代计算技术,在武器装备性能和作战规则约束下,按照战术意图对武器装备的使用进行筹划,使各作战要素以统一的目标、统一的计划,有序、协调行动的一门综合学科.任务规划本质上是以运筹和优化的方法和思想,统筹资源、完成任务.任务规划技术是一项多领域相关、多层面运用、多学科交叉、多技术融合、多系统集成以及人机、脑机交互的高新技术.任务规划技术横向可联通传统技术手段、纵向可融合新兴技术理念,形成传统手段与新兴技术的最佳结合点.进化算法、知识/规则库、分布式协同、机器学习、人工智能、大数据、云计算、AR/VR、脑机结合等新技术、新理念都已经或即将在任务规划技术中得到应用.
未来,任务规划技术随着现代智能技术的发展,将进入蓬勃发展的新时期.任务规划技术可利用知识/规则库、大数据、云计算、人工智能等新技术进行战场态势智能分析与预测,获取敌情信息、我情信息和战场环境信息,包括部队部署、作战态势、活动规律等信息,对获取的战场数据加以智能分析和数据挖掘,从中挖掘出深层次的信息和特征,为决策提供支撑[3].实质上,在新技术的引领下从海量化的知识到精确化的决策正成为当前任务规划技术的最新计算范式,任务规划技术是实现战场知识、信息或数据“增值”的核心手段.任务规划技术融合新的技术手段可迅速提升智能决策的水平,推动传统作战向智能战争实现跨越.人工智能是任务规划技术发展的新引擎,正在重构影响军事作战过程的各环节,知识、信息、数据是这个引擎的原始燃料,例如通过数据挖掘寻找战场的未来走向、通过大数据分析海量数据内在的联系、通过机器学习预测未来对手的行动等.如图1所示.
图1 任务规划技术是实现战场知识、
信息或数据“增值”的核心手段
任务规划起源于高技术信息化武器装备的特殊使用需求,目前在主要军事强国广泛研制和使用.自1991年海湾战争以来,以战斧巡航导弹为代表的高新技术武器装备在美国历次发动的高技术局部战争中得到了广泛应用,取得了显著的作战效果,作为大脑,任务规划是武器系统发挥其作战效能的重要保证[4−6].国内任务规划技术经过多年的发展,取得了长足进步,尤其以军用任务规划技术发展最为迅速,需求也最为迫切.
1.1 任务规划技术发展及路线分析
在军事领域,任务规划技术由于巡航导弹的迫切需求应运而生,时至今日已初步发展为技术系列齐全、标准体系完备、内涵外延丰富的多层次技术群.以运筹学、控制理论、优化算法、人工智能等数学和计算机科学相关理论为代表的一系列理论,为任务规划提供了有力的理论支撑;任务规划应用研究的主要目的是为具体任务规划问题提供模型、算法,形成支撑工程实现的技术方法;任务规划技术研究的最终目标是研制相关任务规划产品,当应用研究逐步走向成熟后通过工程实现直接支撑任务规划产品实现.
根据参与研究的主体、成果应用的方向、面向的背景需求不同,任务规划技术的发展主线可划分为理论探索、应用研究、工程实现3个层次,发展各有侧重,最终目的均为任务系统的产品实现提供具体支撑,如图2所示.
1.1.1 理论探索层次
任务规划相关理论发展主要经历了3个阶段,第1阶段以军事运筹学、控制理论等相关理论为基础,主要目标是实现辅助计算;第2阶段以专家系统、智能优化等相关理论为基础,主要目标是实现辅助决策,降低人的工作负荷;第3阶段以深度学习、数据挖掘等人工智能领域的最新理论成果为基础,主要目标是实现决策的自主化和智能化.
运筹学与军事行业密不可分,运筹学诞生于第二次世界大战初期,用来解决稀少战争资源更有效分配的问题[7].国内军事运筹学研究开展较早,1958年,钱学森教授在国防部第五研究所成立作战研究处,翻译苏联和美国的相关专著;1984年我军成立军事运筹学学会;1990年军事运筹学正式列为军事学二级学科[6].作为较早研究军事问题定量分析和决策优化的理论,其线性规划[7]、动态规划、整数规划[8−9]等理论广泛应用到任务规划系统的研究中.与任务规划相关的控制理论首先是飞行器控制相关理论,早期在巡航导弹和战斗机的任务规划系统中得到应用,经过几十年的发展,国内在飞行器控制领域已经取得了丰硕成果,以北京航空航天大学、南京航空航天大学和航天科技集团、航天科工集团、国防科技大学等相关高校和科研院所为代表;随着无人飞行器,尤其是微小型无人飞行器在军事领域的广泛使用,以一致性理论[10−11]为代表的多机协同控制理论必将在任务规划系统中得到更广泛的应用.
专家系统是人工智能领域的早期成果,其以规则的形式表达领域专家的知识,采用推理机对当前事实进行推理,在某一个狭窄领域获得与领域专家相似的能力[12],是任务规划系统实现自主决策的重要理论支撑.从20世纪80年代至今,在工业经济、农业基础科学、航空航天科学与工程、武器工业与军事技术等相关应用领域发表了大量研究文章,在任务规划领域主要用于构建指挥决策模型,提高任务规划系统的自主化水平.
当前,以深度学习、数据挖掘等理论为代表的人工智能方兴未艾,其对任务规划技术的推动毋庸置疑,未来任务规划技术必将结合人工智能领域的最新成果.从浅层计算到深度神经推理、从单纯依赖于数据驱动的模型到数据驱动与知识引导相结合学习、从领域任务驱动智能到更为通用条件下的强人工智能(从经验中学习)、人工智能、大数据等技术改变了计算本身,也促使任务规划技术从自主化进一步向智能化发展.
任务规划技术在理论探索层的发展脉络,如图3所示.
1.1.2 应用研究层次
应用研究是理论成果与工程实现的纽带与桥梁,近年来随着基础理论的发展和国内军事应用领域对任务规划系统需求的不断提高,大量高校、科研单位的研究人员积极参与到任务规划应用研究当中.关于任务规划技术的研究最早主要集中在飞行器的任务规划领域,包括飞行器任务分配[11−14]、航路规划[15−16]、载荷规划等,并逐渐从单飞行器规划到多飞行器协同规划,从飞行器规划扩展到陆[17]、海、天等多领域平台规划,从单武器装备规划到多武器平台协同规划.
基于面向作战应用的任务规划技术主要解决4个域的实际问题:路径域、目标域、预演域、终段域.在路径域含任务分配、航迹规划问题;目标域含目标分析、毁伤计算、突防分析问题;预演域含仿真推演、攻防对抗问题;终段域含远程管控、效能评估问题.
以路径域为例,对于路径域的任务分配技术,首先出现的是基于线性规划和整数规划的任务分配方法[18],随着智能优化算法的发展,合同网络[13,19]、蚁群算法[20]、遗传算法[21]等一系列智能优化算法被用来解决任务分配问题.对于路径域的航迹规划技术,基于Voronoi图的路径规划方法、基于共同进化的规划方法等,基本属于数学规划方法层面,后逐步演变为一般优化算法、启发式优化算法、决策树模型等.
其典型技术发展路线图如图4所示.
随着深度神经网络模型、云计算的发展,任务规划技术逐渐吸纳这类模型进行复杂问题的求解,对武器装备作战中的毁伤、突防、目标分析、推演、评估、管控等工程问题的解决起到巨大的推动作用.
国内在开展任务规划应用研究的同时,也形成了开放、共享、合作的良好学术交流环境.2009年,我国首届飞行器任务规划技术学术研讨会召开;2011年,中国宇航学会任务规划三级分会成立,第二届任务规划学术研讨会召开;2016年,中国宇航学会批复成立任务规划二级分会,为国内任务规划研究机构和人员深入开展学术交流与合作搭建了良好的平台.
1.1.3 工程实现层次
任务规划技术在巡航导弹领域得到首次工程实现,近些年随着新型战机、无人机、舰船等高新装备的发展,其配套的任务规划系统也纷纷开始研制.经过多年的发展,实现了从单武器到多军兵种联合、射前预案规划到全程作战筹划控制的跨越,构建了相对完整的任务规划技术工程应用体系[22].从工程实践经验角度来看,任务规划技术工程化的特点是“基础在平台、核心是模型、关键是数据”.平台的重点是满足网络化、服务化、国产化、自主可控的需求,模型重点是通用化,且支持多领域模型快速积累和复用,数据的重点是种类完备且具有标准的数据保障规范体系[23].
根据装备的发展与作战的体系化变革历程,任务规划技术在该层次可以归纳为4个主要的阶段,即:单型武器任务规划技术、装备平台任务规划技术、合同作战任务规划技术、联合作战任务规划技术.国内主要以工业部门为研究主力,如中国航天科工集团、中国航天科技集团、中国电子科技集团等.工业部门以型号研制为牵引,逐渐发展成为一个完整的研发体系,如航天三院在国内构建了由研发平台、模型体系、数据工程组成的任务规划工程研发体系,为任务规划系统研制和任务规划技术验证创造了条件.研制出我国第一型通用任务规划平台(CMPE);首创通用任务规划建模语言MPDL,构建了覆盖各领域装备的性能/效能/战术模型体系;建立从数据需求、保障渠道、交换格式、校验方法,到管理分发途径的完整数据工程解决方案.我国在任务规划工程实现层技术能力的发展路线如图5所示.
1.2 国内外任务规划技术发展对比分析
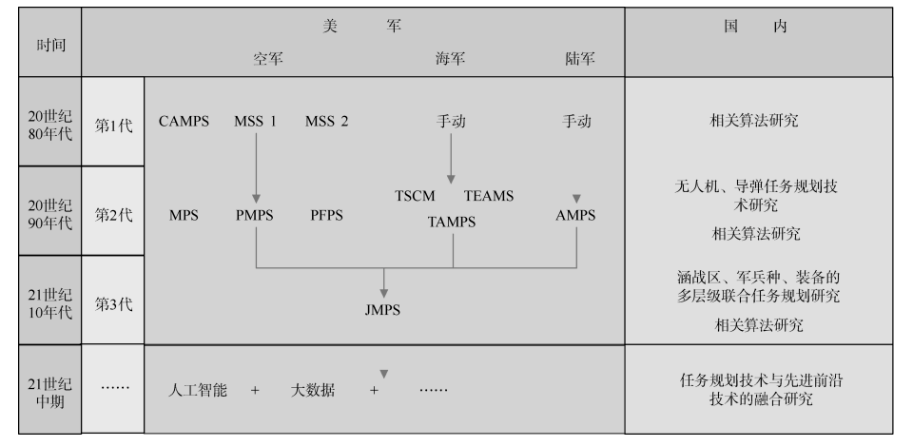
自20世纪80年代以来,世界各国纷纷开展了任务规划技术的研究.以美军为代表的西方国家最早开展任务规划的研究、研制和应用,在世界处于领先地位[24−25],其陆海空三军都分别装备有不同的任务规划系统[26],从系统层面美军与国内的发展对比如图6所示.
进入新世纪以来,发达国家对军事领域的任务规划技术提到了新的
高度.美军重视新技术背景下对智能化任务规划技术的探索.来自南加州大学的研究人员设计了虚拟指挥体系,作战人员可以在充满各类作战信息的虚拟指挥中心内指挥作战,甚至可在虚拟体系中直接实现对作战平台的操控.目前主要军事强国均对人工智能等先进技术在任务规划领域的应用产生了强烈兴趣.美国国防部于2017年透露,其已建立整合利用大数据和机器学习能力的职能团队[27−28].
与发达国家相比,国内任务规划相关技术还有很大的进步空间[2].在分析研究我军军事任务规划需求的基础上,对标国际拓展研究思路,以理论研究为指导,完善配套模型、数据、标准等,未来可重点开展联合任务规划体系框架、功能使用、运行机理等系统研究与应用.同时在面对人工智能这一全球共同的机遇时,任务规划技术成为支撑人工智能转化为军事“超级智能”的关键,人工智能对任务规划技术的颠覆性潜力正逐步显现.

图5 任务规划技术的工程实现层发展历程
在未来作战智能化、信息化的大背景之下,国内大力发展相关高新技术武器装备和指挥体系,任务规划技术的研究进入了空前繁荣阶段,任务规划技术经历了从离线预案式规划向在线响应式规划、智能预测式规划的跨越式转变,未来将会有更多的新技术、新理念与任务规划技术相结合以支撑智能化战场条件下的军事作战辅助决策.基于网络信息体系的互联互通能力,将体系仿真技术融入到任务规划技术中,在与指挥控制和情报保障无缝接驳的基础上,基于最新态势和目标进行超实时仿真分析与效能评估,“预测”战争走势,“透视”战场未来变化,实现体系作战过程中动态、灵活的作战资源配置和作战行动方案的不断优化调整,将信息优势转化为决策优势与行动优势,任务规划技术在未来将扮演“战争设计者”的角色.
2.1 新时期任务规划技术面临新的需求
现阶段以人为核心的态势判断和火力筹划等为代表的常用任务规划技术无法适应未来高对抗战场作战下的智能作战,迫切需要自主化任务规划技术的支撑来发挥武器系统最大作战效能.任务规划系统要实时判断,依据敌方兵力、火力,我方的武器数量、位置、战斗部类型等,快速做出打击或规避的决策,并生成各个作战单元可执行的规划策略,为指挥员提供决策智力支持.同时高效、准确的仿真推演技术可以验证决策成果在模拟真实战场中的效果,支撑决策成果的实时调整需求.
目前,大多数的任务规划系统采用人工判读和决策模式,大大加重了指挥员的认知负荷,态势越复杂,作战单元越多,越难做出快速正确的决策,且仅仅依靠指挥员的先验知识,往往很难做出最优的选择,并存在诸多不可控的人为因素[29].战场态势和环境的瞬息万变,迫切需要在线群体智能决策技术的支撑来降低保障需求和提升自主能力.面对敌方目标活动范围广、机动性强等特点,事先很难获取准确的目标信息,而发射后管控也很可能面临干扰或致盲而阻断.因此,防御环节的层次性、对抗环境的激烈性以及信息保障的困难性、信息链路的脆弱性等现实问题,是新时期任务规划技术将面临的重要问题[30].
“无处不在”的人工智能使我们隐约地看到未来任务规划技术将以新的姿态为我们服务.面对这一艰巨的科学目标,我们还需要应对以下多个挑战,如何让机器像人类一样感知和理解世界;如何使机器具有自我意识、情感以及反思自身处境与行为的能力等.如同遗传学的发展,人工智能亦是一把双刃剑,伴随技术的深刻变革,任务规划技术过度依赖人工智能也会带来伦理道德问题,我们需要的是“帮助我们解决问题的智能任务规划技术而不是替代我们决策的智能任务规划技术”.
2.2 任务规划技术重点发展方向及展望
现如今任务规划系统和现代技术都取得了突飞猛进的发展,任务规划系统和现代技术的融合将成为研究人员未来研究的主要方向.当前技术发展环境下,任务规划技术面向联合作战战场应用,其发展正逐步呈现出以下特征:一是云计算、大数据、服务化等互联网信息技术的大量应用,将使任务规划在多层级部署、功能服务化、数据模型建设、计算效率大幅提升等方面有了坚实发展基础;二是高带宽、高可靠性的通信技术日新月异,将有力推动战前阶段的预案规划向着作战阶段的动态规划发展;三是高性能嵌入式计算设备和人工智能技术的突飞猛进,将促进任务规划向着武器装备作战过程中的自主规划、群体智能规划方向发展[31−32].
在研究各种任务规划方法的基础上,通过多学科的交叉并将人工智能、虚体空间理念、智能人机接口、智能决策理论、智能化仿真推演以及建模与优化等先进理念/技术广泛地融合到任务规划技术中,使任务规划技术能适应快速发展的智能战场军事需求.未来实战化的仿真推演和游戏化的模拟训练是任务规划技术逐步走向成熟的关键途径,同时逐步建立健全的面向智能作战的任务规划体系,将从根本上应对任务规划技术创新性不足的难题.对于未来任务规划技术的重点发展方向以及与先进技术的融合趋势,笔者认为任务规划技术的融合边界没有确定范围,即大多数先进信息化技术都可以在一定程度上找到与任务规划相契合的点,本文选取几个目前较为成熟的技术方向进行简要论述.
2.2.1 面向智能作战的任务规划体系
在新时代,智能战争的需求背景下,完善、健全的任务规划体系是释放出“智能红利”的关键.不同于以往,未来任务规划体系应突出其面向应用的特点,同时也要适应我军新的作战指挥制度建设的步伐.构建完善的面向智能作战的任务规划体系是未来任务规划技术发展的核心任务,其主要内容包括:完善体系的共性支撑、丰富体系的实践应用、深挖体系的关键技术.
完善面向智能作战的任务规划体系是为推进任务规划发展模式从“跟踪研发”为主向“自主创新”转变.依托任务规划体系支撑层完善对平台、模型和数据的构建,提升快速研发能力、渗透集约化研发理念;依托任务规划体系应用层完善对多层级一体化运用能力的实现,分层构建涵盖军委–战区–军种–武器的多级智慧决策体系,体现智能规划、精准规划的技术内涵;依托任务规划体系完善技术层对技术体制、总体架构、核心技术的深度挖掘,构建“云+网+端”的灵活使用环境,满足网络动态、高效互联,技术体制通用、展现形式灵活的需求,其任务规划体系理念构想如图7所示.
2.2.2 新一代智能规划技术
新一代智能规划技术最大的特点在于对人工智能及大数据的运用,是任务规划技术发展的一个巨大跨越.该技术提高特定任务中的数据计算准确性、缓解指挥系统中指挥员的决策压力;未来通过开发更高效的语言处理系统,可让机器基于任务规划系统更好的执行人类的命令,提高任务规划系统的可信度[33−34].如图8、图9所示,新一代智能规划技术已应用于军队.
深度学习的发展是人工智能技术进步的关键,在人工智能的支撑下,新一代智能规划技术首次超越人类表现的主要里程碑包括:国际象棋(1997年)、trivia(2011年)、Atari游戏(2013年)、图像识别(2015年)、语音识别(2015年)、和Alpha
Go围棋(2016 年)[35−39].
作战不同于下棋,没有经验棋谱和真实数据可循,因此,基于传统知识的学习将难以适应智能战争的发展,以AlphaGo
Zero为代表的智能博弈为实战运用与任务规划的耦合式发展带来了新曙光.博弈对抗是人工智能发展的新方向,通过机机对抗系统可以实现对抗数据收集整理,为下一步知识和数据混合驱动的博弈推理学习训练奠定基础[40−41].
2.2.3 基于仿真推演的任务规划技术
基于任务规划技术形成的方案决策结果需在敌我对抗的动态博弈中不断更新调整.仿真推演技术可提供真实战场的模拟环境、预测战局走向,将任务规划与仿真推演相结合能够实时检验方案决策结果的准确性,如图10所示.仿真推演与任务规划深度融合构建闭环联合作战体系是未来任务规划技术发展的重要方向之一.
现代战争是体系与体系的对抗,大量战场要素在不断随交战过程演进、变化,使得交战过程存在复杂的不确定性.作战装备体系执行初期制定的作战计划将很难达到预定的目标、难以适应战场的最新态势.仿真推演与任务规划深度融合可拓宽其在未来智能战场的应用范围,并在3个层次支撑闭环联合作战体系的构建,即:辅助结果优选、支持敌我博弈、支撑自我博弈,如图11所示.
图9 美军人工智能领域智能决策与任务规划结合应用于军队
图10 将仿真推演与任务规划融合构建闭环联合作战体系
仿真推演技术可以在结果优选方面支持任务规划进行定量化结果评估.对装备体系作战任务的仿真分析要求将仿真放在动态、复杂多变的战场中进行,传统依赖静态态势、任务数据的作战任务评估仿真模式,往往无法反映瞬息万变的战场态势,其分析有效性将大打折扣.面向未知的智能化战场,任务规划技术需提前预知敌方行动并实时调整我方规划结果,多分枝仿真技术可提供支撑“透视战场”的能力.
仿真推演技术可以在敌我博弈方面支持任务规划进行智能化行动预测.对复杂的体系化交战过程而言,复杂、耦合的战场要素模型结构,大量的不确定性以及不完善的理论和先验知识,极大程度上影响了对体系作战仿真的正确性,及基于此类应用进行作战任务分析的正确性,难以真正实现对敌方未来行动的准确模拟.智能化仿真推演将定式化模拟敌方行动提升至自主化预测敌方行动层面,面向敌我博弈的仿真推演技术可以为我方行动进行预警,提升作战决策的动态规划能力,为我方的体系化作战能力构建、敌我双方的体系化对抗能力生成提供技术支撑.
图11 仿真推演多层次支撑任务规划技术能力的提升
仿真推演技术可以在自我博弈方面支持任务规划进行大样本数据积累.任务规划与仿真推演相结合的高阶应用是智能化战场自我博弈的实现,智能化的自我博弈可解决战场复杂体系对抗过程的动态性、不确定性及战场要素机理不完备性等问题.未来智能化战场的自我博弈是机器之间进行对抗,在没有固定数据样本的情况下生成大量随机样本,为后续的机器学习提供数据、知识,训练出新的战场模型、战术战法等,同时战场自我博弈可以使敌方模型训练的更为逼真,为准确的任务规划奠定模型基础.基于仿真推演的任务规划技术可为面向体系化作战的装备体系提供智能规划、作战仿真、任务评估能力,分析装备在智能战场、体系作战中的贡献度问题.
2.2.4 先进人机交互技术
面向任务规划领域的先进人机交互重点依托虚拟现实和增强现实技术.
虚拟现实技术产生于20世纪60年代,目前在任务规划领域最主要的应用是结合单兵实战或模拟训练,通过其对计算机图形技术、多媒体技术、传感器技术、人机交互技术、网络技术、立体显示技术以及仿真技术等多种技术的集成,以成本低、逼真度高的特点,最大程度地代替实战训练,提升军队战斗力,节省军费开支,缩短武器的研制周期如图12、图13所示.
图15 头盔套装(Helmet Kit)和增强现实处理器CARP
增强现实技术是一种将计算机生成的虚拟物体、场景、提示信息等实时叠加到真实场景中的技术.通过将增强现实与任务规划技术的融合,在联合作战指挥系统中,使用增强现实数字化系统传输指令,比使用模拟通信系统更为准确,更有利于下级正确理解上级意图,同时作战指挥人员也能随时随地掌握每一个作战单元的情况.如图14、图15所示.
本文梳理了任务规划技术的发展脉络及现状,并在此基础上与国外先进任务规划技术及理念进行了对比分析,然后重点分析未来任务规划技术发展面临的核心问题,展望了发展的重要方向.伴随着科技的飞速发展,在新的全球环境与形势下,高精尖技术与概念层出不穷,作为军事作战与指挥核心大脑的任务规划技术能否紧跟时代潮流,直接关系着未来智能化战场我军能否占据主动地位.
任务规划技术是现代信息技术发展的产物,是贯彻落实联合作战条件下“提高精确感知、精确指挥、精确打击、精确评估、精确保障能力”的抓手,在未来信息化战争中具有重要的军事价值和广阔的应用前景,其研究成果对推动国民经济的发展和国防力量的建设具有极为重要的意义.此外,随着科技的不断进步、需求的不断提升,以及各种新理论、新方法的涌现为该领域注入了源源不断的动力,使其研究的范围越来越广,研究的对象越来越复杂,研究的内容越来越深化,研究过程与实际应用的结合越来越紧密.
References
1 成茂荣,蔺卫,罗金亮,等.信息化条件下空中作战任务规划问题研究[J].飞航导弹,2015(9):61−64.
2 王玥,张克,孙鑫.无人飞行器任务规划技术[M].北京:国防工业出版社,2015.
3 陈娇叶,罗卫兵,杨钦诃.美国无人系统发展重点及趋势分析[J].飞航导弹,2012(11):35−37.
4 关世义,孙华.飞航导弹任务规划技术的回顾与展望[C]//首届中国飞行器任务规划技术学术研讨会论文集,2009:1−5.
5 HILLIER F S.Introduction to operations research[M].New York:Tata McGraw-Hill Education,2012.
6 邵国培,徐学文,刘奇志,等.军事运筹学的过去、现在和未来[J].运筹学学报,2013(1):10−16.
7 李大东,孙秀霞,孙彪,等.基于混合整数线性规划的无人机任务规划[J].飞行力学,2010(5):88−91.
8 叶媛媛,闵春平,朱华勇,等.基于整数规划的多UCAV任务分配问题研究[J].信息与控制,2005(5):38−42.
9 李华伟.多无人机协同任务规划研究与实现[D].西安:西安电子科技大学,2014.
10 周峰.多自主体系统分布式一致性跟踪控制研究[D].北京:北京理工大学,2015.
11 张庆杰.基于一致性理论的多UAV分布式协同控制与状态估计方法[D].长沙:国防科学技术大学,2011.
12 MICHAEL N.Arti fi cial intelligence a guide to intelligent systems[Z].Harlow:Addison Wesley,2005.
13 龙涛,朱华勇,沈林成.多UCAV协同中基于协商的分布式任务分配研究[J].宇航学报,2006(3):457−462.
14 龙国庆,祝小平,周洲.多无人机系统协同多任务分配模型与仿真[J].飞行力学,2011(4):68−71.
15 李季,孙秀霞.基于改进A-Star算法的无人机航迹规划算法研究[J].兵工学报,2008,29(7):788−792.
16 宋建梅,李侃.基于A∼*算法的远程导弹三维航迹规划算法[J].北京理工大学学报,2007(7):613−617.
17 柳林.多机器人系统任务分配及编队控制研究[D].长沙:国防科学技术大学,2006.
18 田松,晁爱农,毛红保.无人机任务规划[M].北京:国防工业出版社,2011.
19 郝莉莉,顾浩,杨惠珍,等.Simulink/State fl ow的AUV群体协作合同网快速原型仿真[J].火力与指挥控制,2013,38(2):26−30.
20 苏菲.动态环境下多UCAV分布式在线协同任务规划技术研究[D].长沙:国防科学技术大学,2013.
21 肖支才,程春华.基于改进遗传算法的反舰导弹协同任务规划[J].计算机与数字工程,2010,38(5):22−24,41.
22 何煦虹.飞航导弹任务规划系统的现状及发展趋势[J].飞航导弹,2009(5):15−18.
23 邢立宁,陈英武.任务规划系统研究综述[J].火力与指挥控制,2006,31(4):1−4.
24 张继春,吴伟泽.美国陆军数字化部队研究现状和发展趋势[J].舰船电子工程,2013,33(3):7−8.
25 周其忠,史晓丽,郭洪文,等.任务规划技术在装备综合保障中应用探讨[J].战术导弹技术,2014(6):64-68.
26
DIONNE D,RABBATH C A.Multi-UAV decentralized task allocation with
intermittent communications:the DTC algorithm[C]//American Control
Conference.IEEE,2007:5406−5411.
27 刘新艳,黄显林,吴强.国外任务规划系统的发展[J].火力与指挥控制,2007,32(6):5−9.
28 陈炳峰.外军任务规划系统分析与启示[J].舰船电子工程,2013,33(9):24−27.
29
ATKINSON M.Contract nets for control of distributed agents in unmanned
air vehicles[C]//Aiaa “Unmanned Unlimited”Conf.and
Workshop&Exhibit,2013.
30
MANYIKA J,CHUI M,BROWN B,et al.Big data:the next frontier for
innovation,competition,and productivity[J].Analytics,2011,4(8):15−18.
31 LABRINIDIS A,JAGADISH H V.Challenges and opportunities with big data[M].Stanbul:VLDB Endowment,2012.
32 肖利,王能斌,徐宏炳,等.挖掘转移规则:一种新的数据挖掘技术[J].计算机研究与发展,1998(10):39−43.
33 BOGUE R.The role of arti fi cial intelligence in robotics[J].Industrial Robot,2014,41(2):119−123(5).
34 BARELLA A,VALERO S,CARRASCOSA C.Jgomas:new approach to AI teaching[J].IEEE Transactions on Education,2009,52(2):228−235.
35 罗翊,王克宏.基于归纳的机器学习方法的实现研究[J].计算机科学,1992(2):69-74.
36 阎明印,蔡振江,杨晶栾,等.适于专家系统的机器学习模型与过程[J].沈阳工业学院学报,1997(1):61−65.
37 段金菊,余胜泉.学习科学视域下的e-Learning深度学习研究[J].远程教育杂志,2013(4):43−51.
38 鄢华.模糊深度学习网络算法的研究[D].哈尔滨:哈尔滨工业大学,2012.
39 李明树,唐朔飞,石东林,等.基于知识的机器人规划系统KBROPS-2及其规划结果的对比分析[J].模式识别与人工智能,1994(2):133−142.
40 朱战霞,杨博,袁建平.人工智能在卫星任务规划中的应用[J].飞行力学,2008(1):79−82.
原文链接:https://mp.weixin.qq.com/s/ih2fjba8Grk3nBj05hQ0RQ