来源:溪流之海洋人生
跨介质航行器(HAAV)是一种不仅可以在空中飞行或水中潜行,还可以反复多次出入水的航行器,具有机动性强、隐蔽性强、可适应复杂水况等优点,在民用和军事领域有较大的应用前景。
跨介质航行器要能兼备空中和水下的航行,因此并不是航行器和潜航器单介质航行器的简单技术叠加。其关键技术包含水空介质动力技术、水空跨越过程稳定控制、整体结构设计、机体水密技术等。水的密度是空气的800多倍,黏性系数是空气的50多倍,两者特性差异巨大,要想增强航行器在2种介质之间的运动能力,就必须设计出一种既能够适应水空多模式运动,又能在水空过渡过程中受控折叠的可变机翼系统。跨介质航行器可变机翼方案大致可分为扑翼、固定翼、多旋翼3种结构。扑翼结构在水空介质转换时会产生极大的动力损失,多旋翼结构飞行速度低、活动半径小,旋翼臂水下阻力大,以上特点导致以上2种结构形式无法应用在大中型跨介质航行器中。
为了更好地研究固定翼跨介质航行器变体技术,本文分析了变体结构的设计要求以及分类,综述了国内外跨介质航行器结构设计,总结了其关键技术和发展前景,为跨介质航行器结构发展提供参考。
一、跨介质航行器变体概述
跨介质航行器航行模式包含空中、入水、水下、出水4种模式。空中飞行时要求航行器质量轻、有足够的升力、较高的机动性;在水下航行时要求航行器有较高的结构强度以及较小的航行阻力。水的密度以及黏度较大,这就要求在空中飞行时提供升力的机翼能够进行折叠以减小水下航行阻力以及入水时冲击力。
⒈变体要求
在任务执行过程中,变体主要在航行器出入水过程开展,因此航行器变体结构要求与出入水方式密切相关。航行器出入水方式可以分为渐变式跨越和瞬间式跨越2种方式,如图1所示。渐变式跨越航行器入水时首先在水面滑翔一段距离减速随后再潜入水中,受到的瞬时冲击力较小,供航行器变体的时间也比较长,如图1(a)所示;瞬间跨越式航行器则在短时间内直接潜入或者冲出水中,受到的冲击力较大,供变体的时间较短,如图1(b)所示。
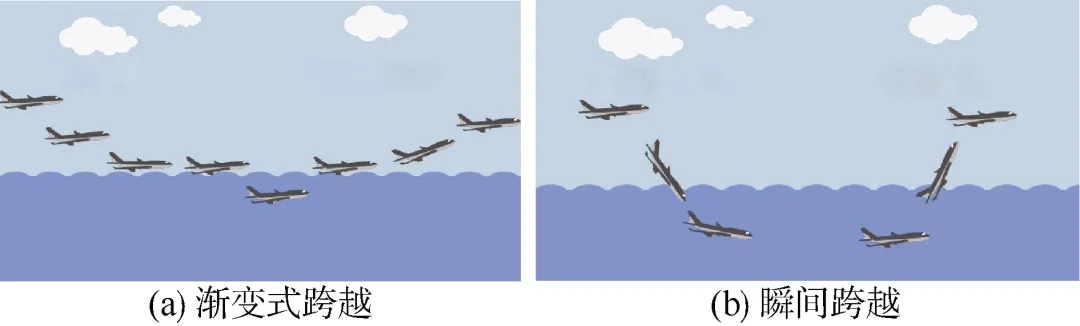 图1 跨介质航行器出入水方式
图1 跨介质航行器出入水方式
⒉变体分类
根据变形位置,可以将变体技术分为变翼型以及整体变形2种。整体变形又可以进一步分为平面变形以及空间变形,如图2所示。
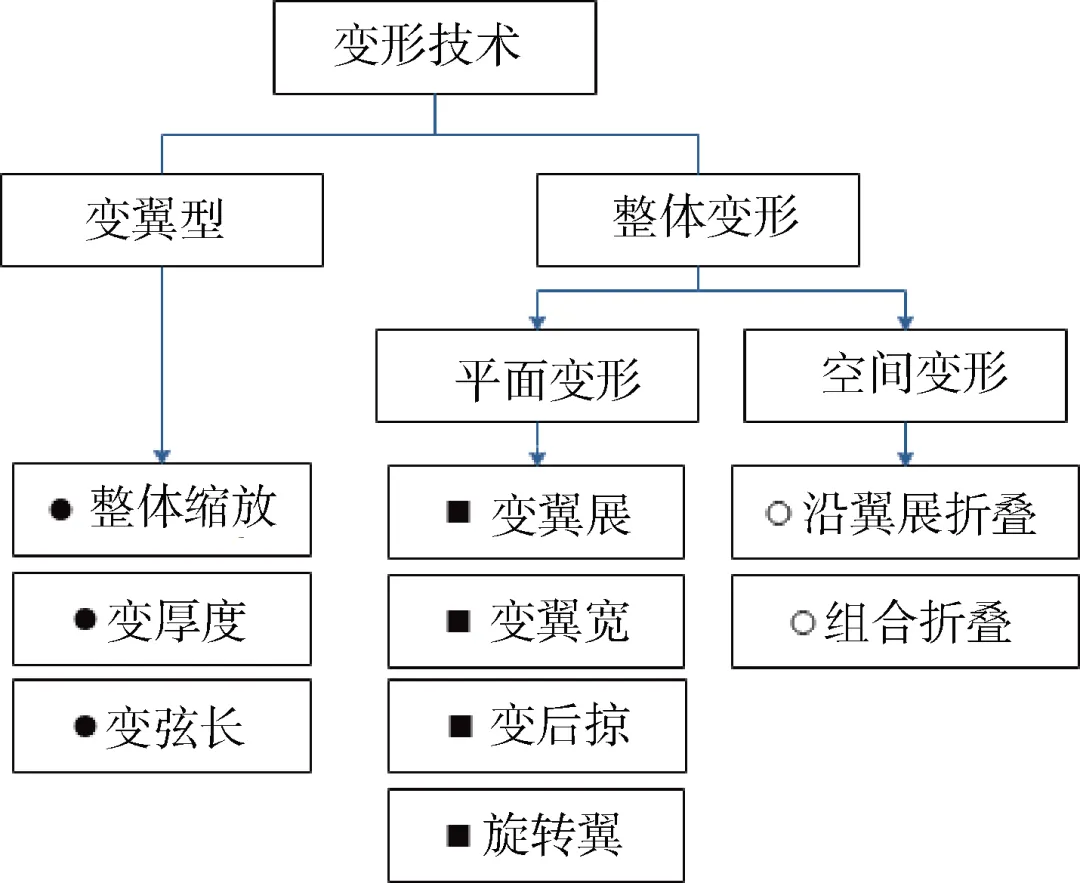 图2 变体技术分类
图2 变体技术分类
变翼型可分为整体缩放、变厚度、变弦长3种结构,如图3所示。变翼型结构要求机翼具备主动柔性变形的能力,通过减小机翼截面积、厚度、弦长等参数减小入水后的阻力。
 图3 变翼型技术
图3 变翼型技术
平面变形可以分为变翼展、变翼宽、变后掠、旋转翼结构,如图4所示。
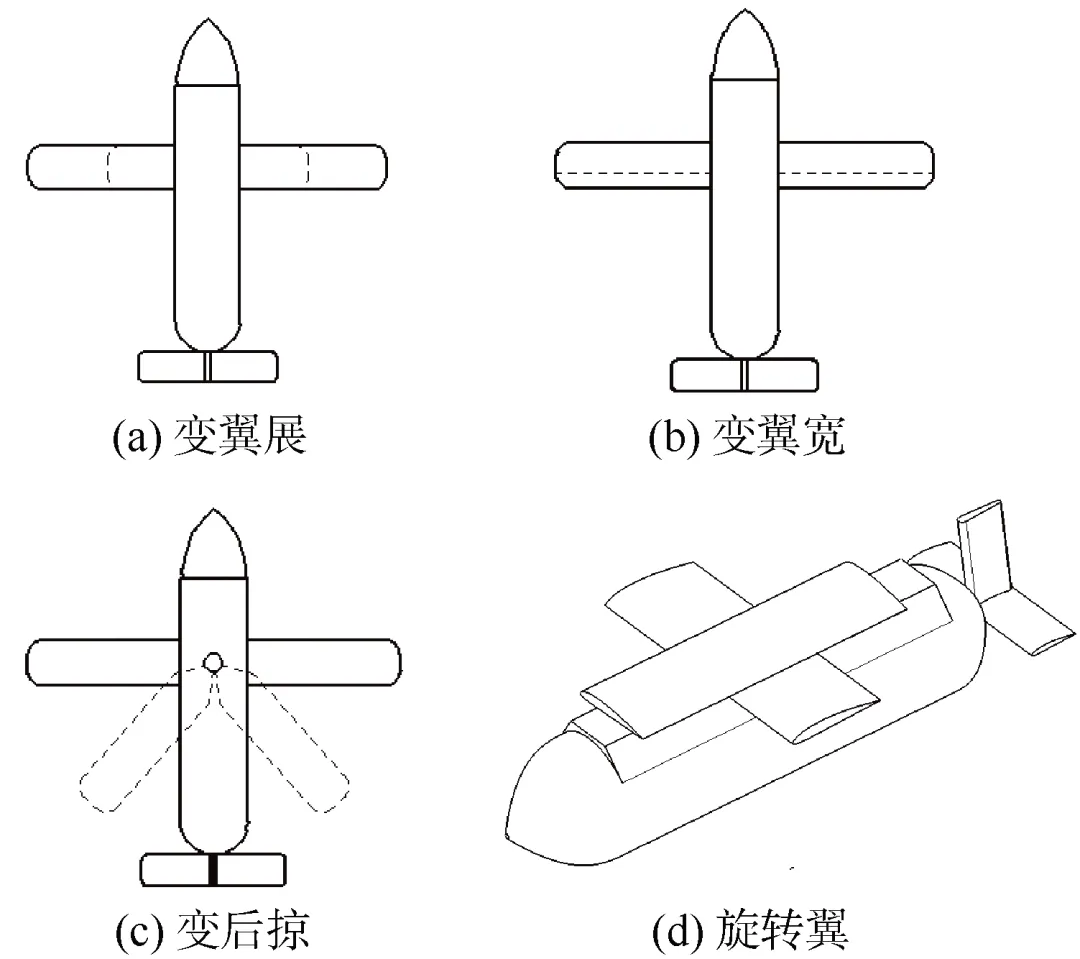 图4 平面变形技术
图4 平面变形技术
变翼展结构在平面内将部分机翼收纳至航行器或者机翼自身内部;变翼宽结构则将机翼沿弦长方向进行收纳,减小翼面积;变后掠结构通过设置在机翼根部的铰链进行变形,改变机翼的后掠角以改变航行阻力;旋转翼结构与变后掠翼类似,但铰链的位置设置于机翼中心。
空间变形方式则大体上分为沿翼展方向折叠和组合折叠,沿翼展方向折叠可分为单铰链折叠、多铰链折叠。单铰链折叠方式如图5(a)、5(b)所示;多铰链折叠方式如图5(c)、5(d)、5(e)所示;图5(f)为组合折叠,该机构需要分别进行2次折叠,机翼折叠后收纳在航行器两侧。
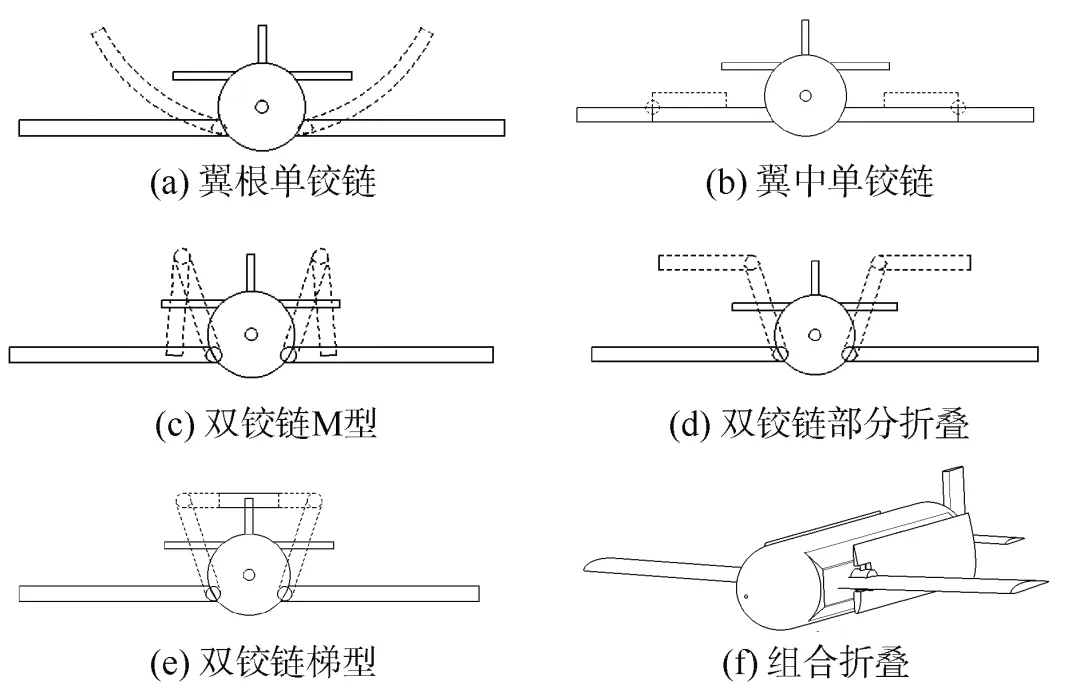 图5 空间折叠技术
图5 空间折叠技术
二、航行器变体结构发展
⒈国外现状
2006年,美国洛克希德·马丁航空公司开发了一款名为“鸬鹚”的跨介质航行器并进行了试验,2008年研发终止。该航行器可由潜艇的导弹筒发射,在筒内呈折叠状,如图6(a)所示,展开状态如图6(b)所示。其机翼由3段组成,最外侧2段相对固定,第1段和第2段相连接处为柔性结构,可向内进行折叠,折叠后的机翼紧贴下部机身。折叠的主要作用是为了和潜艇导弹发射筒兼容,折叠状态下该航行器不具有水下机动性。折叠方式为空间折叠中的翼中单铰链方式,折叠后与机身共形,与发射筒有较好的兼容性。
 图6 “鸬鹚”跨介质航行器
图6 “鸬鹚”跨介质航行器
2008年,美国DARPA战略技术办公室提出了一项计划,旨在设计一种能够携带910kg的人员且能够在空中、水面、水下使用的潜水飞机。美国的一些大学和研究机构提出了几种方案,其中一种方案为带“V”形尾翼和鸭翼的三角翼面布局,机身内部设置有乘员舱、浮力舱、驱动舱和燃料舱。尾翼最高处安装有通气管用于获取空气,水面和水下航行采用喷水推进,空中飞行采用螺旋桨作为动力。为了适应空中和水下航行,左侧和右侧机翼可沿中部进行对折,折叠方式如图7所示,其折叠方式也为翼中单铰链方式,对折后的机翼可兼用作水翼。
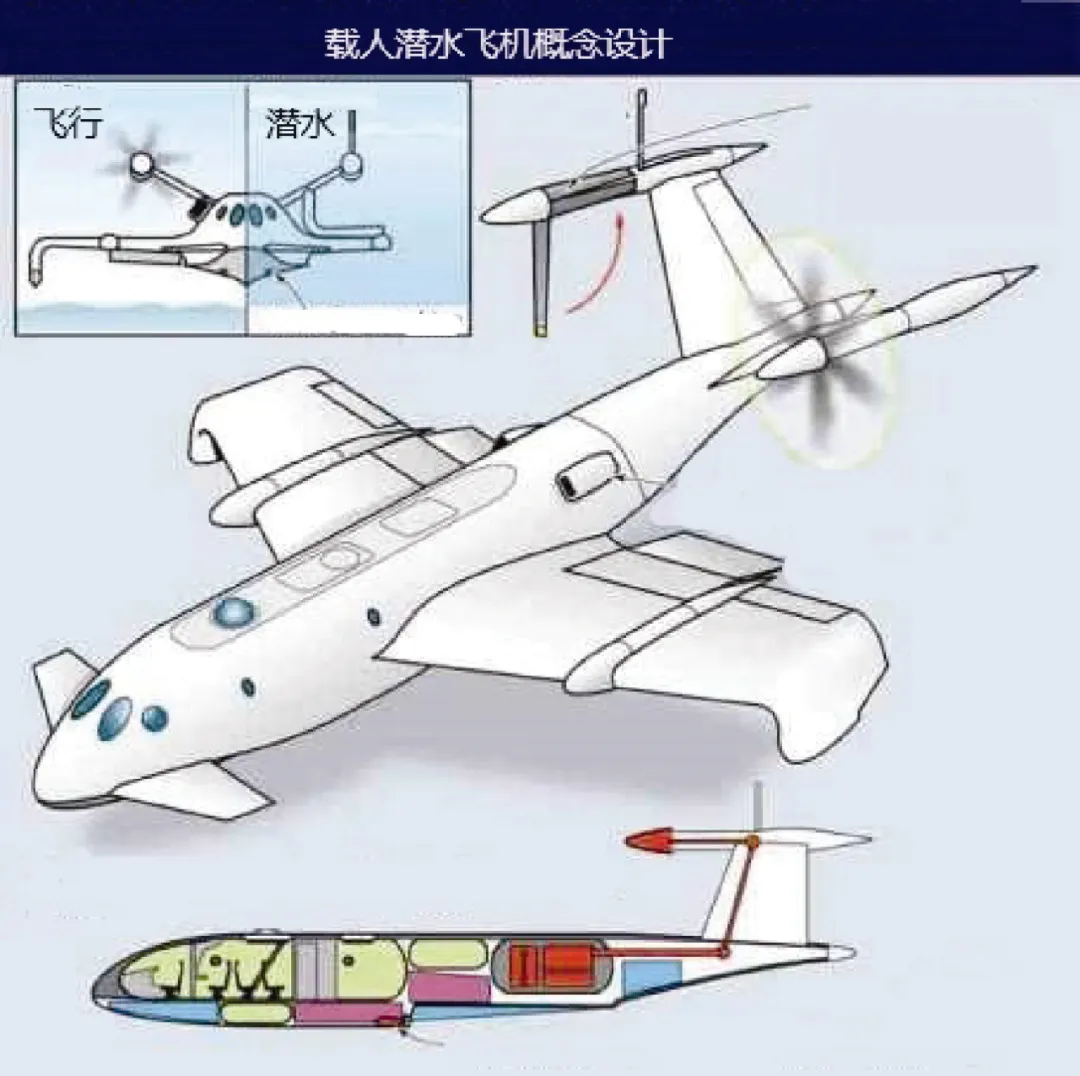 图7 美国载人潜水器方案
图7 美国载人潜水器方案
受到鲱鸟和北方鲣鸟启发,美国MIT林肯实验室于2011–2012年开发了一款仿生跨水–空介质航行器。该航行器安装有主动触发式机翼折叠机构,折叠方式采用平面折叠中的后掠方式,如图8(a)所示,在机翼伺服电机带动的卡扣(WingFoldingTrigger)释放后,碳纤维弹簧(CarbonFiberSpring)驱动机翼在0.25s内完成折叠,折叠状态如图8(b)所示。但由于其结构设计,机翼只能进行一次折叠而无法再次展开。
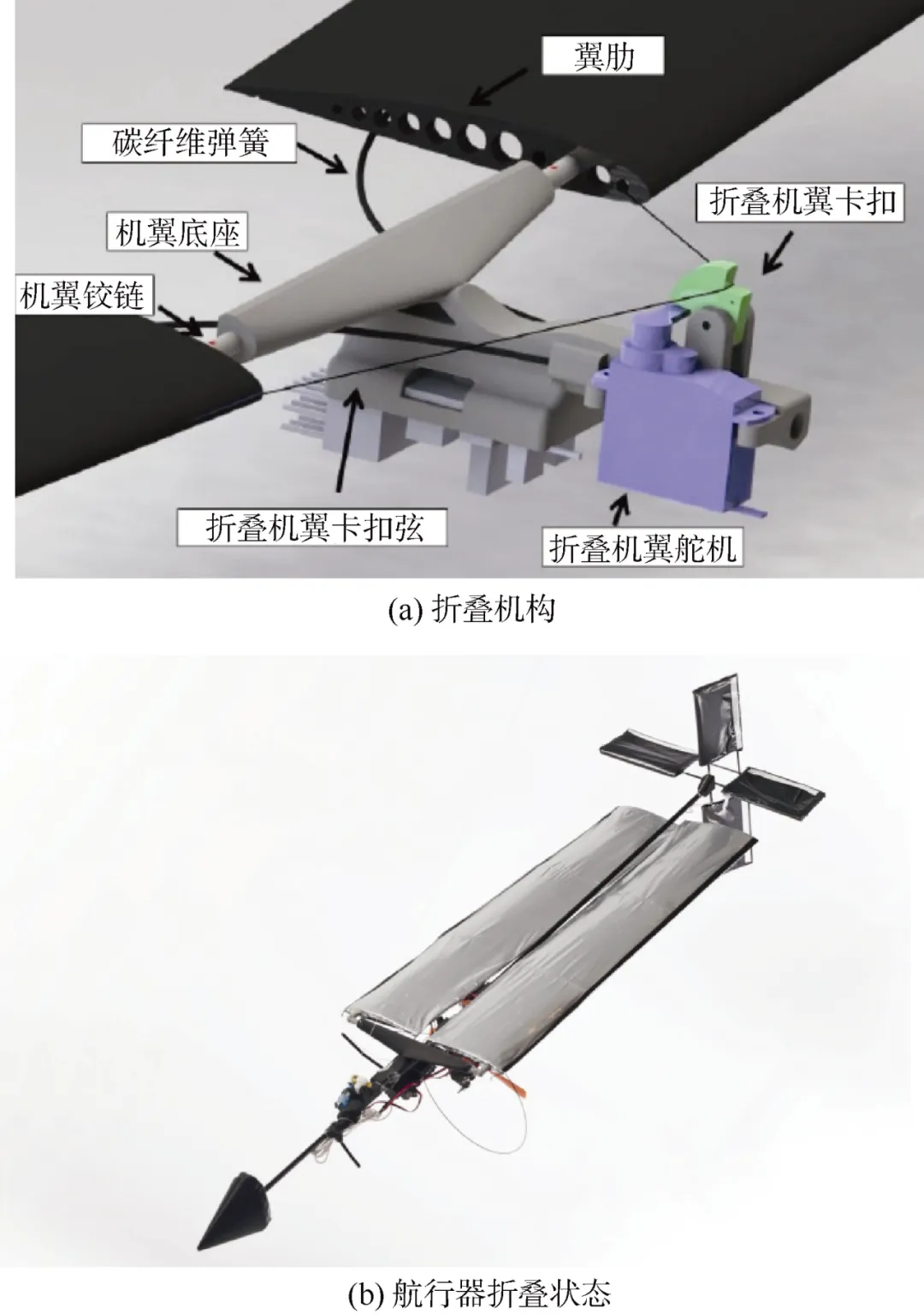 图8 “鲱鸟”跨介质航行器
图8 “鲱鸟”跨介质航行器
2013年,美国海军研究局研制了一款由氢燃料质子交换膜电池驱动、从潜艇水下发射续航可达7h的无人机。该无人机可用于情报收集和监视侦察,其机翼为一次性可折叠“X”形机翼,由2组分别位于机翼上下两侧的机翼组成,如图9(a)所示。由鱼雷管弹射装置发射出水面后,在螺旋桨推动下离开水面,如图9(b)所示,折叠机构采用平面变形中的旋转翼方式,机翼围绕在机翼与机身相交的中部铰链旋转展开。
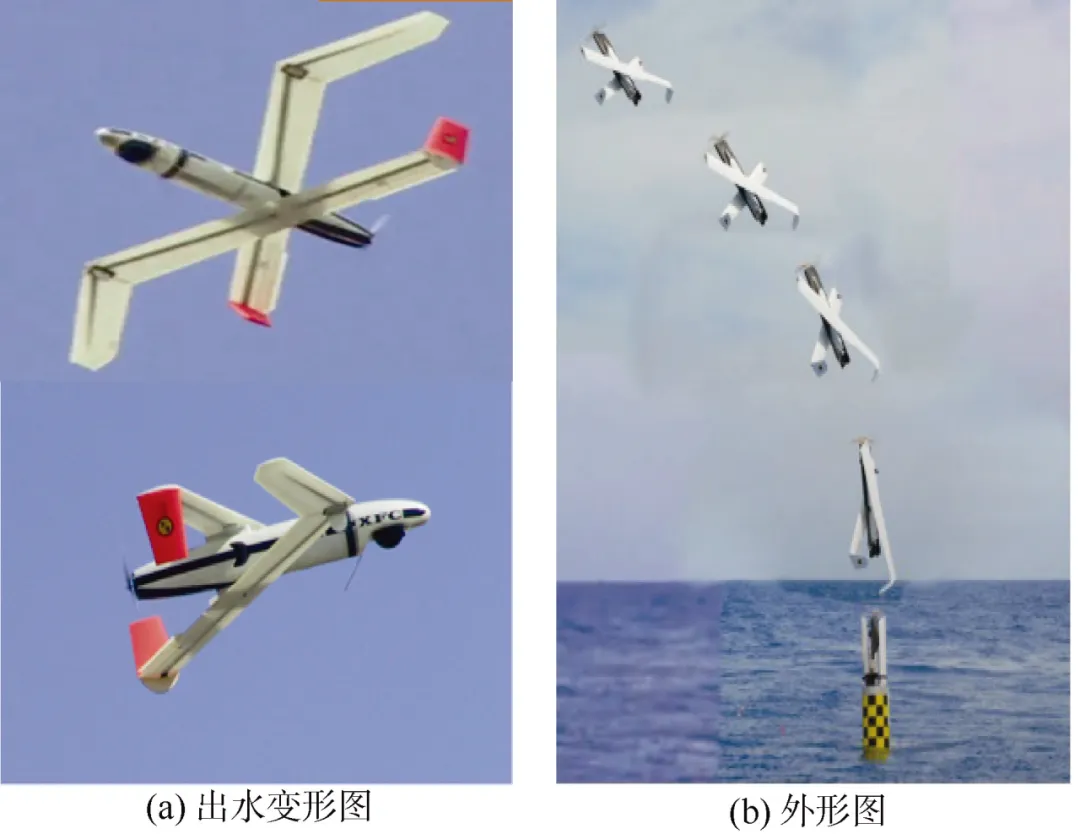 图9 “XFC”无人机
图9 “XFC”无人机
2016年,英国帝国理工学院仿照鲣鸟设计了一款可变形的跨介质航行器,外形如图10(a)所示。该航行器最大翼展592mm、飞行速度10m/s,续航时间为14min,动力为电池供电。主翼分为3段,中断为柔性且固定在机身上,变形机构采用平面变形中的变后掠方式,该折叠方式结构简单,左右机翼变形可通过同一机构进行驱动。左机翼与右机翼根部1/4弦长处安装有铰链并通过齿轮机构控制两侧机翼后掠角度协调一致,如图10(b)所示,齿轮通过6.5g舵机进行驱动,最大扭矩为0.23N·m。整体采用椭圆形机翼,与梯形翼相比能够减小根部铰链的受力。
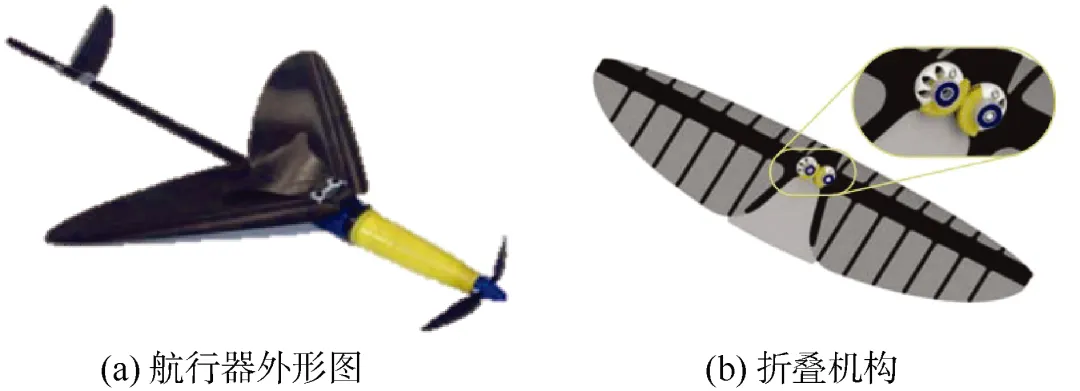 图10 AquaMAV跨介质航行器
图10 AquaMAV跨介质航行器
⒉国内现状
2009年,北京航空航天大学研制了一款名为“飞鱼”的跨介质航行器,可协助潜艇进行侦查监视和攻击,不同状态如图11所示。其采用平面变形方式中的90°变后掠,在潜水上浮后可打开或折叠以满足飞行构型,具体变形机构未见详细报道。
 图11 北航“飞鱼”无人潜航器
图11 北航“飞鱼”无人潜航器
2011年,南昌航空大学刘伟等人设计了一种油电混合潜水无人机,外形如图12(a)所示,整体采用空间折叠中的组合折叠的方式,折叠机构如图12(b),折叠后可收纳在机身两侧,水下航行阻力大大降低。该无人机通过滚筒5收放绳索6和机翼主梁转轴3的旋转配合实现机翼的折叠和扩展,如图12(c)、12(d)所示。但该无人机在试飞的过程出现翼根连接处刚度不足、收放力矩过大等原因未能实现预期,但其仍然提供了一种可行的空翼折叠方案。
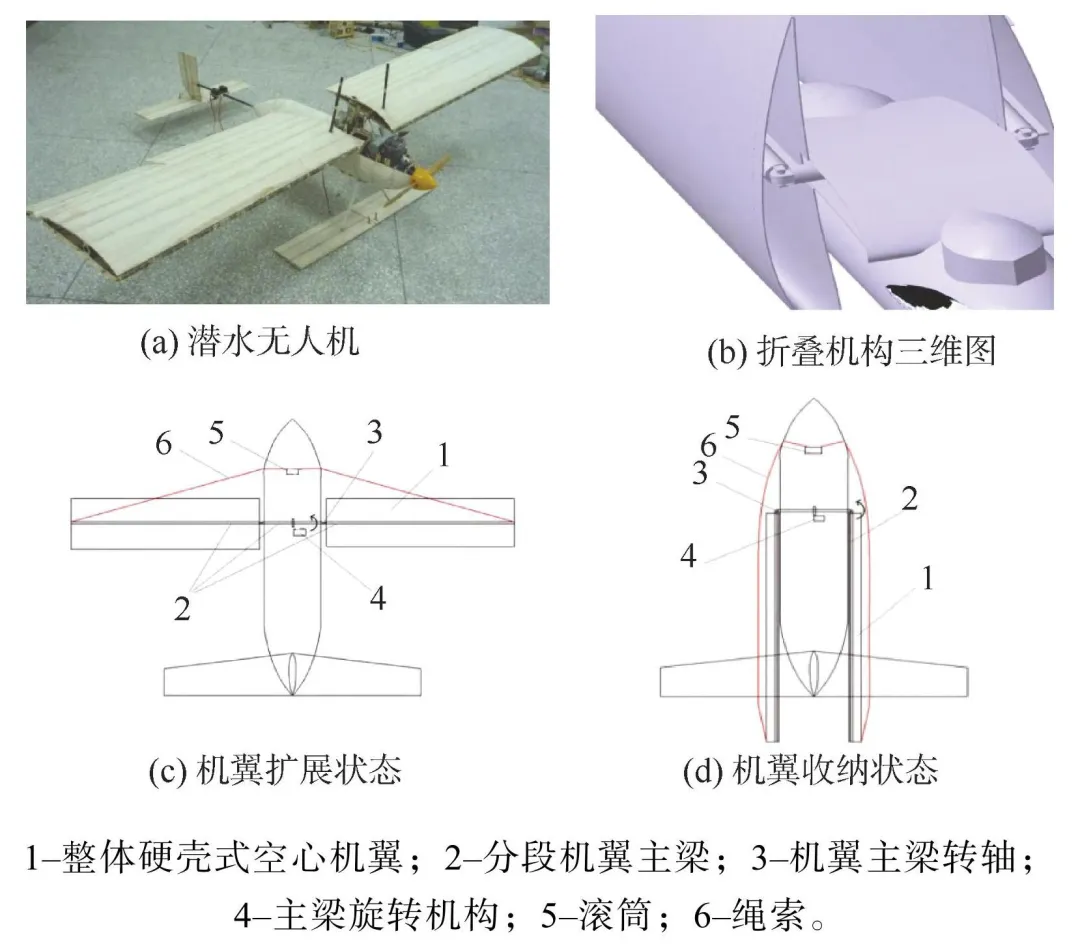 图12 南昌航空大学油电混合跨介质无人机
图12 南昌航空大学油电混合跨介质无人机
2013年,北京航空航天大学梁建宏等人开发了一款小型仿生鲣鸟跨介质航行器,外形如图13(a)所示。机翼采用变后掠翼方式进行折叠,左右两侧机翼通过连杆连接于机身滑轨,如图13(b)所示。通过计算分析了不同落水高度、不同后掠角和不同入水倾角条件下翼根的峰值径向载荷。垂直入水、机翼后掠角为零时产生的峰值载荷最大可达1135.00N。
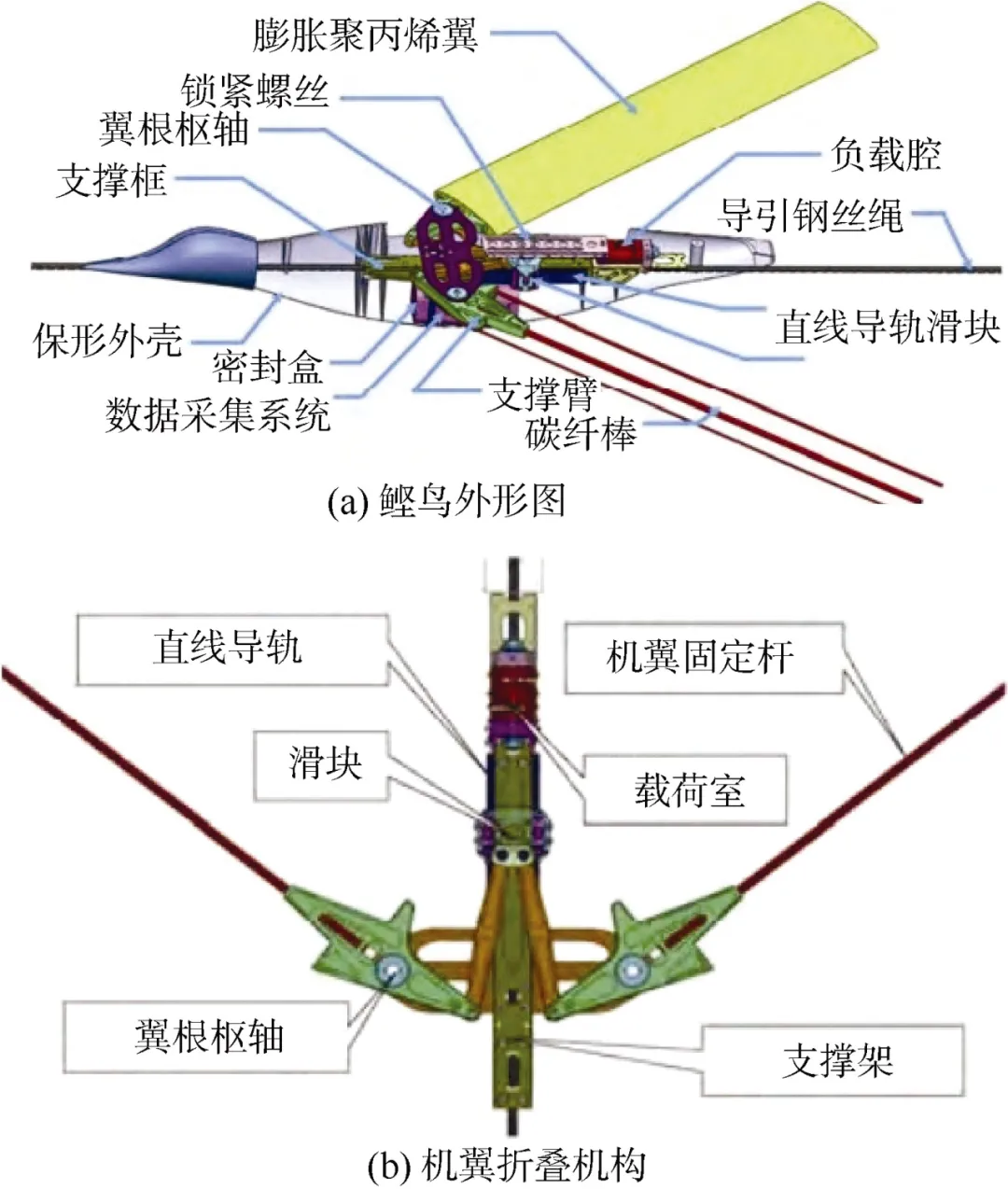 图13 北航仿生鲣鸟
图13 北航仿生鲣鸟
2020年,中南大学云忠等人仿翠鸟设计了一款单一动力源驱动的跨介质航行器,重点运用CFD手段研究了入水高度、角度等多因素对入水动力学性能的影响。该航行器质量为2.03kg、体长600mm。变体结构采用空间折叠方式中的多铰链折叠方式,机翼整体为三段式,在空中时为展开状态,水中以及出水过程为折叠态,折叠机构如图14所示。该折叠方式优点是在水下时可以利用外翼以及襟翼调整航行器姿态,缺点是与后掠翼相比水下阻力稍大且折叠机构较为复杂。
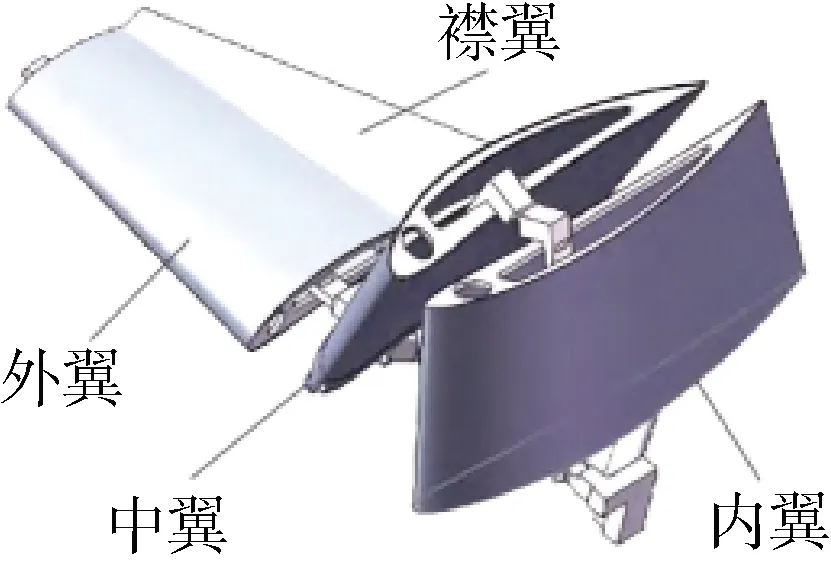 图14 沿翼展三段式折叠结构
图14 沿翼展三段式折叠结构
2022年,北京大学南昌创新研究院开发了一种基于仿生结构的跨介质航行器,该滑翔器采用从水面滑翔出入水的方式。该航行器设置有水翼和空翼2套机构折叠机构,采用变平面变形技术中的变后掠方式,空翼分前后2对,每对分左右2个机翼,如图15(a)所示,在每对机翼根部安装有折叠机构。折叠机构采用共轴反向双齿轮盘方案,由电机通过锥齿轮副带动上下齿盘旋转,实现机翼的折叠和打开,完成变形后由齿轮进行限位,折叠机构如图15(b)所示。
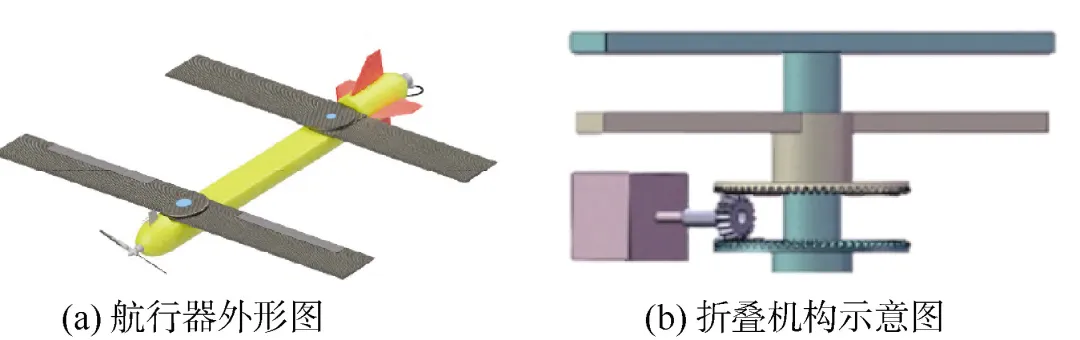 图15 新型仿生水–空跨介质航行器
图15 新型仿生水–空跨介质航行器
2022年11月,哈尔滨工程大学水下机器人技术国家级重点实验室设计了一款名为“长弓2号”的跨介质航行器并成功进行了试飞。该航行器尺寸长1.9m、翼展2.5m,可在空中、水面、水下进行航行,该变体结构采用变后掠折叠方式,外形如图16(b)所示,具体变后掠机构未在论文以及报道中体现。
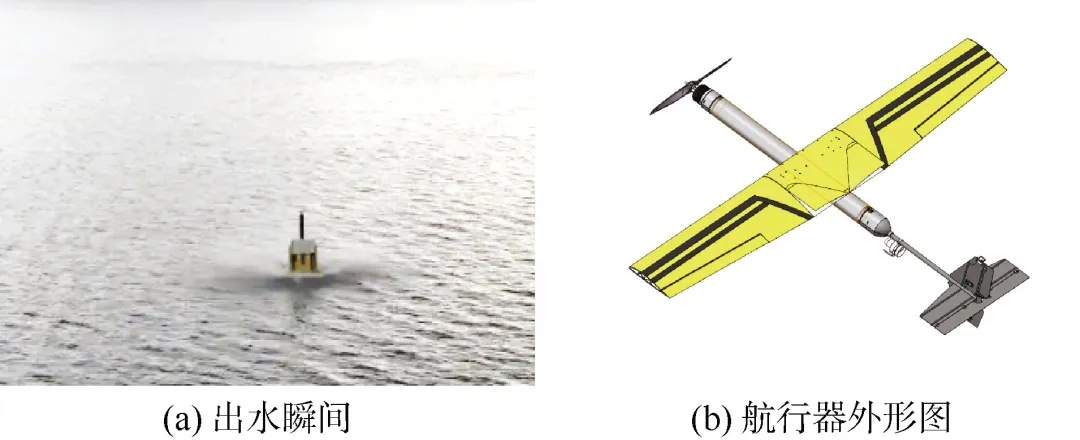 图16 “长弓2号”跨介质航行器
图16 “长弓2号”跨介质航行器
2023年哈尔滨工程大学申请了一项名为“一种用于小型无人机的机翼折叠机构”发明专利,该专利公开了一种由舵机和连杆机构驱动的折叠机构,该机构采用平面折叠中的变后掠方式,通过图17(a)中滑块6与图17(b)中滑道10的配合实现机翼在折叠位和展开位的自锁。
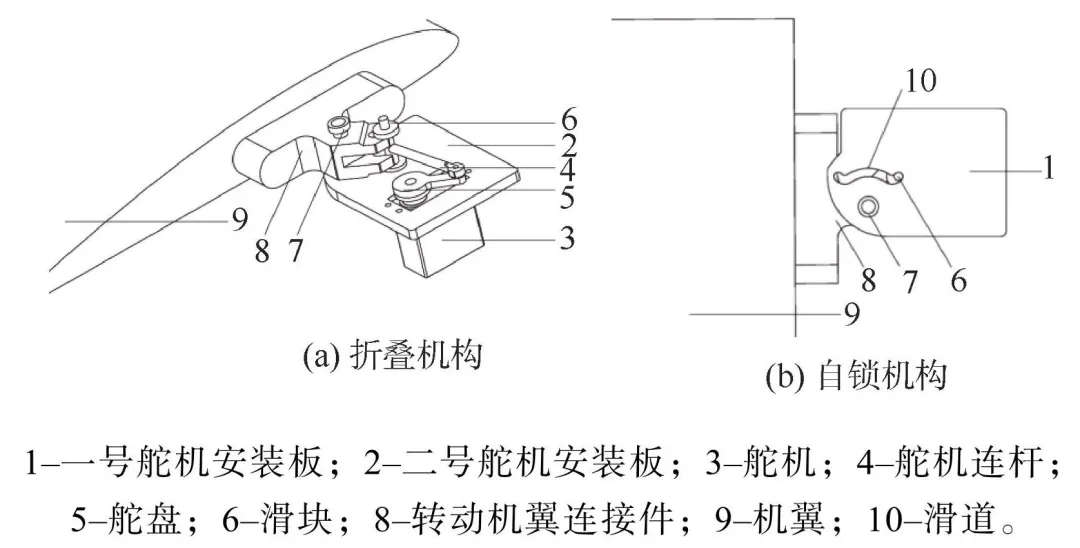 图17 一种机翼折叠结构
图17 一种机翼折叠结构
三、变体技术总结
目前,世界各国对跨介质航行器(HAAV)的研究较多,也产生了较多的变形方案。但大部分停留在概念设计和理论计算阶段,经过试验的数量较少。经过试验的HAAV均为小型航行器,变体结构多采用结构简单、变形过程气动力变化较为平稳的变后掠折叠方式,其技术由单次折叠向可重复折叠、从齿轮驱动向舵机–连杆机构驱动方向进行发展。而大中型跨介质航行器的变体设计方案,多采用横向折叠方式,其技术由单铰链向多铰链方向进行发展。
变后掠折叠方式设计简单,通过靠气压液压、齿轮机构进行驱动,结构实现较为容易,变体过程气动力变化平稳,但存在变体所需驱动力大、根部铰链同时受弯矩和扭矩易损坏的缺点。特别是在实际机翼内部设置有燃油等设备而重量较大的情况下,变后掠过程航行器重心沿机体纵轴变化大,影响整体稳定性。横向折叠方式则较为复杂,折叠过程机翼气动力变化较大,但经过良好的设计后,横向折叠后的部分机翼能兼用于水下航行,折叠机构枢轴受力优于变后掠机构。
四、结束语
本文围绕跨介质航行器的变体结构,探讨了变体要求、分类、国内外发展现状。首先探讨了跨介质航行器的特点及其对变体机构的要求,随后根据变形位置对变体结构进行了分类,回顾了国内外跨介质航行器的发展和最新实践,主要结论如下:
⑴21世纪以来,随着材料技术、控制技术、能源技术的发展和应用需求牵引,可多次跨越水–空介质的航行器逐步从方案设计走向探索实践,国内多所大学成功进行了技术验证;
⑵国内外的小型跨介质航行器均采用变后掠翼的方式进行变体,变后掠机构采用齿轮或者连杆机构进行驱动;
⑶大中小跨介质航行器仍停留在概念以及方案设计阶段,变体结构多采用沿翼展横向折叠的方式;
⑷跨介质航行器变体结构的设计对航行器的控制策略有较大影响;
技术的发展和应用场景拓展对大中型跨介质航行器提出了更高的要求,国内外众多研究机构主要在后掠翼变体机构上进行了大量研究和实践,但其固有缺陷限制了在大中型平台的迁移应用,采用横向折叠等方式的新型折叠机构将成为大中型跨介质航行器的一个研究重点。
【作者简介】文/于向财 王志雄 谭巍 史永运,来自海军航空大学航空基础学院。第一作者于向财,1978年出生,男,副教授,主要从事航空发动机、跨介质飞行器研究。文章来自《数字海洋与水下攻防》(2025年第1期),用于学习与交流,参考文献略,版权归作者及出版社共同拥有。
由“溪流之海洋人生”微信公众平台编辑与整理。
原文链接:https://mp.weixin.qq.com/s/WOyKRAEmDLfliFM0gxcFjA