![]()
以下文章来源于海鹰资讯 ,作者杨文钰 李东兵等
引 言
导航技术已深入到人类生产生活的各个领域,其长期稳定地提供服务是国家正常运转的重要保障。当前,卫星导航在各国具有全方位、多层次、宽领域的应用,其他自主导航方式处于辅助地位。然而,卫星导航存在其固有缺点:信号弱,且容易受到干扰和欺骗。为确保美国在定位、导航与授时(PNT)服务无法使用时,基础设施仍能正常运转,2020年2月12日,美国总统特朗普签订了《通过负责任地使用PNT服务增加国家弹性》行政令,希望通过备份路基的远距离无线电导航系统(eloran)系统及加强惯性导航等资金投入,为国家PNT增加弹性。
2020年,在各国政府、公司和组织等的支持下,不依赖卫星的导航技术取得一定进展。本文对受到关注最多、应用领域最广的惯性导航技术进展进行介绍,并总结视觉导航、天文导航、数据库匹配导航、仿生导航、量子导航和协同导航在2020年的研究进展,以期为相关领域的研究提供参考。
NO.1
惯性导航
通过测量速度和加速度等参数,并对测得参数进行积分运算,惯性导航可以实时获取物体的位置和速度信息。由于惯性导航系统(INS)通常内置在待测物体中,通过自身传感器获得待测信息,不依赖于卫星等外部条件,对外界变化不敏感。
近年来,随着现代物理学、计算机技术、电子技术、先进微加工艺技术等现代科学技术的高速发展,惯性技术取得了一定的进步。
目前,惯性导航市场占据主导地位的研究机构有诺格公司、霍尼韦尔公司、赛峰公司、雷锡恩公司、L3 Harris公司等。KVH公司、iXblue公司、Civitanavi公司等也参与了竞争,但市场份额较小。2020年,未出现有竞争力的公司加入市场竞争,但随着惯性技术涉及的技术领域进一步扩大,预计市场上还会从各个技术领域涌现出新的竞争者。
(1)精度要求引领着惯性元器件不断进步,也同时推动了相关技术的发展。高精度惯性元器件使用的领域更加广阔,同时,其体积和质量进一步减小。
2020年2月,惯性实验室发布了其产品双天线惯性导航系统(INS-DL)的研究报告。INS-DL可实现1cm的位置精度和0.05°的航向、俯仰和滚转精度,可为OpenWorks工程公司反无人驾驶系统的SkyWall自动响应系统提供精确的位置和方向,使系统在高度动态的条件下也能正常运行。
2020年11月,惯性实验室发布紧凑型工业级惯性测量单元(IMU)产品Kernel-100,其三轴微机电(MEMS)加速度计具有小于10 μg的偏置运行稳定性,三轴MEMS陀螺仪具有小于2 (°)/ h的偏置运行稳定性。借助连续的内置测试、可配置的通信协议、电磁干扰保护和灵活的输入功率要求,Kernel-100可以集成到运动参考单元、AHRS,以及GPS辅助INS中。
2020年8月,VectorNav公司推出了其战术嵌入式惯性系统产品,包括战术级IMU和多频段全球导航卫星系统(GNSS)辅助INS,如图1所示。产品质量仅为15 g,结构紧凑,可提供毫弧度的姿态精度和厘米级的定位能力。应用程序包括框架式情报、监视和侦察(ISR)有效载荷、卫星通信系统、高精度激光雷达测绘和摄影测量。战术嵌入式传感器还支持用于ISR、电子战、弹药和无人机导航的外部防欺骗GPS模块。

图1 VectorNav公司的战术嵌入式惯性系统产品
(2)体积、重量、功耗和成本等综合性能不断优化,加工工艺不断提高。对于具体的惯性陀螺、加速度计等,研究进展体现在工艺的进步,品质因子的不断提高以及抗冲击、振动等力学性能的不断提升。
2020年8月,SBG系统公司的Ekinox2-D双天线GNSS辅助INS已集成到波兰第一艘自主水文勘测无人水面舰艇(USV)中,设计用于大型船只难以或无法达到的水域进行水文测量。该产品尺寸、重量和功率(SWaP)低,占用空间小,拥有IP68防护等级的坚固外壳,可有效适用于空间受限、复杂的地形。
(3)INS与GNSS组合导航系统在精度、性能和可靠性等多个方面均优于单独的子系统,具有良好的应用前景,根据政府采购和民用市场需求,各个公司不断推出新产品,并对性能进行优化。
除前述VectorNav公司和SBG系统公司外,2020年4月,角斗士技术公司推出小型高性能GNSS/INS,高性能LandMark 60 INS/GPS(如图2)和紧凑型LandMark 005 INS/GPS(如图3)产品,均具有先进的传感器融合技术,将GNSS位置数据与低噪声、高输出惯性传感器以及气压计、磁力计结合在一起;均具有扩展卡尔曼滤波器,可在短期GPS中断期间提供精确的位置信息,精度达2 nmile/h。

图2 Landmark 60 GNSS/INS

图3 Landmark 005 GNSS/INS
2020年5月,运动跟踪模块制造商Xsens公司集成了GNSS辅助INS的模块,推出MTi-680G,如图4所示。其集成内部实时运动(RTK)功能可将标准商用GNSS接收机中的最大定位误差从±1 m降低到±2 cm,具有厘米级精确定位功能,包含RTK GNSS接收器以及同步的三维姿态和航向输出。MTi-680G专为无人机、机器人和无人系统等应用设计,可提供高达400 Hz的全面定位和导航输出。

图4 MTi-680G
NO.2
其他导航
2.1视觉导航
视觉导航通过摄像机对周围环境进行图像采集、滤波和计算,完成自身位置确定和面向目标的路径规划,并做出导航决策。近年来,视觉导航提取图像、无线电信号等环境信息进行分析,结合图像数据、数字地形数据完成定位和路径规划,常用于辅助惯性导航。视觉导航的主要研究机构有Draper试验室、喷气推进实验室、Autonomous System 实验室、机器人感知试验室、多自主机器人系统试验室等。
2020年,视觉导航的研究进展主要体现在算法优化方面,算法的优化可提高视觉导航精度,增加不可见环境的导航成功率,增强了视觉导航的自主性。
2020年1月,加州大学圣塔芭芭拉分校、微软雷蒙德研究院和杜克大学的学者研究了视觉语言导航任务中的三个关键问题:跨模态接地、不适定反馈和泛化问题。研究提出了一种强化跨模态匹配(RCM)方法。结果表明,RCM模型将SPL指标提高了10%。为提高学习策略的泛化性,研究进一步引入自我监督的模仿学习方法,减少了可见环境和不可见环境之间的成功率差距(从30.7%缩小到11.7%)。
2020年4月,无人机导航公司研发的视觉导航系统旨在减少航位推算导航中积累的位置误差,该系统在实时飞行条件的初步测试中取得了成功。该系统可提高无GNSS信号的导航性能,总漂移小于行驶距离的1%,消除与时间相关的漂移。
2020年7月,Inertial Sense公司展示了其用于自主导航的Luna软件平台。Luna平台可提供有关机器人位置、性能和路径的高精度信息,可用于监视和控制单个机器人或整个车队。Luna结合了来自各种传感器(包括相机、INS和GPS)的输入,并使用复杂的视觉处理、地图绘制和对象检测算法来提供精确导航,路径和图案跟随精度为6~10 cm。
2.2数据库匹配导航
在数据库匹配导航方式中,各类基础数据预先存储于设备中,传感器感知到的各类信息与预先存储的数据进行比较,得到导航与定位信息。通过计算机的内置匹配算法来实现数据的比较。因此,数据库匹配导航的精度依赖于传感器感知、基础数据库数据以及匹配算法。按照数据库类型,数据库匹配导航包括地磁匹配、重力匹配、地形匹配、景象匹配等。
数据库匹配导航的主要研究机构有Draper试验室、美国宇航局(NASA)、惯性试验室、Micro-G Lacoste公司等。
2020年,地形匹配技术应用领域进一步扩大,成功提高了NASA的火星车在选点降落过程中的定位精度,地磁匹配导航技术的精度进一步提升,已达到略低于卫星导航定位的精度。
2020年2月,NASA毅力火星车搭乘阿特拉斯-5型运载火箭发射升空,在着陆与探测任务中,利用地形匹配导航技术,毅力号将实时地形图与预存的地图进行比较,以确定降落点周围的环境,躲开降落过程中可能遇到的陡坡和大型岩石。在之前的任务中,根据深空网络提供的数据,初步估算其相对于地面的位置,估算误差约为1~2 km,在进入大气期间估算误差增长到约2~3 km。利用地形相关导航技术,毅力火星车利用降落伞降落,穿越火星大气时估算自己的位置,定位精度可达60 m。
2020年8月,美空军地磁导航技术取得进展。美国空军联合麻省理工学院,研究利用地球磁场为飞机等军用载具提供导航。研究结果显示,地磁导航定位精度可精确至10 m,略低于GPS的3 m精度。但相比GPS,地磁导航的信号非常稳定,被干扰可能性低,更不可能被摧毁。联合研究团队中的戴维·雅各布空军少校称,只有核爆炸规模的干扰才能影响到地磁信号。
2.3仿生导航
仿生导航即模仿生物导航的机理,涉及生命认知科学以及相关算法。相应地,仿生导航研究方向分为仿生传感器技术与仿生导航算法。2020年,光学、声学原理的仿生传感器有所突破,作为仿生导航难点的算法尚无重大进展。仿生导航的主要研究机构有法国国家科学研究中心、英国帝国理工大学、美国波士顿大学、澳大利亚国立大学、印度国家技术研究所等。
仿生传感器主要有仿生光罗盘、仿生磁罗盘、仿生眼和仿生声呐等。2020年,仿生光导航和仿生声呐均取得进展。2020年1月,波士顿大学研究团队在《PLoS Computational Biology》期刊上发表了其对闭环虚拟森林中鹰蛾飞行轨迹的研究。研究表明,飞蛾在很大程度上依靠光流来导航,而不是明确观察场景中各种障碍物的位置,飞蛾的导航策略可以用于设计无人机控制策略。
仿生声呐方面,2020年1月,美国《国家科学院学报》刊载了来自德国埃尔兰根-纽伦堡大学、比利时安特卫普大学和荷兰阿姆斯特丹大学的研究成果。研究团队开发出了一种由蝙蝠式声呐传感器和花卉式声呐反射装置组成的仿生声呐系统,并在原理验证试验中演示了它们的功能。结果显示,花卉式声呐反射装置可以提高蝙蝠式声呐传感器引导机器人的导航效率,即使在复杂环境中,传感器也能可靠地检测到这些反射装置。
2.4量子导航
量子导航可以分成无源导航和有源导航两种。由于量子有源导航的定位过程通常使用卫星作为信号源,本文主要研究使用量子传感器设备进行定位的量子无源导航系统。
量子无源导航系统中,量子导航传感器、计时器是核心模块,它们的性能直接影响系统的导航能力。2020年8月6日,由伯明翰大学领导的英国量子技术中心传感器与授时领域的研究人员设计一种使量子传感系统小型化的方法,使用光学超表面来减少激光传输系统的尺寸,其介电超表面光学芯片冷原子装置如图5所示,该研究发表于《科学进展》。
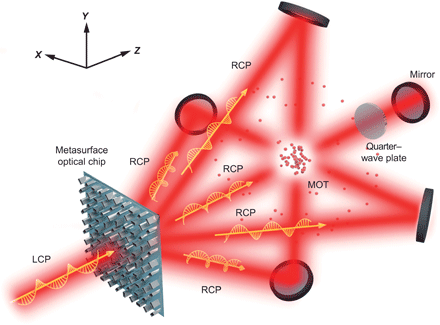
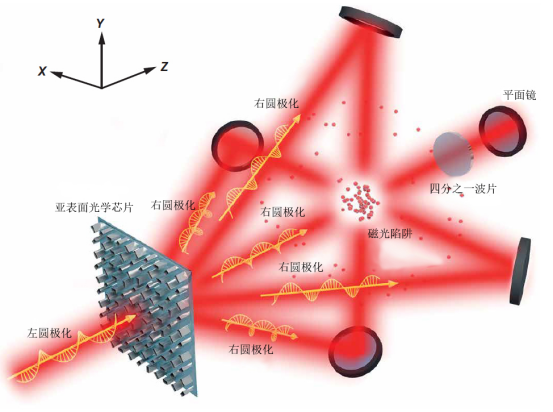
图5 介电超表面光学芯片冷原子装置示意图
2020年1月,澳大利亚的Q-CTRL公司和Advanced Navigation公司建立了合作伙伴关系,从2020年7月起,这两个组织将进行联合技术开发,以支持量子传感领域的合作研究与开发以支持民用和国防市场,重点是量子增强的精确导航和授时。2020年8月,美空军研究试验室在Beta SAM网站上发布消息称,试验室将制定空军的量子信息科技战略,重点是开发、演示和部署量子系统。其应用的关键领域包括计算,传感通信,网络以及定位,导航和授时。
量子磁力计的发展尤其受到国外研究机构重视。2020年4月,美国市场调研公司发布了第一份分析量子磁力计市场的行业分析报告《量子磁力计全球市场:2020~2029年》。报告研究了驱动量子磁力计市场的技术和市场因素。公司认为,在医学、军事和地球物理应用方面,到2025年,市场份额预计会增长到7亿美元以上。2020年5月,美国空军研究试验室4位研究员成立小组以寻找用于磁力计的量子材料。目前,研究试验室正资助麻省理工学院林肯试验室研究磁力计的原型。电子工程师迈克尔博士表示,他们希望在2021年演示原型设备。
2.5协同导航
随着飞行器编队、机器人编队等执行任务的优势日益突出,协同导航成为研究热点。协同导航的研究可以大致分为两个领域,导航方法和协同方式。
导航方法的发展主要依赖于各细分技术领域的研究进展,即本章其他小节涉及技术的进步以及第一章惯性导航技术的发展。协同方式的研究重点在于初步自组网完成之后,根据环境和任务的变化,系统不断改变编队方式,保证后续任务高效完成。2020年,协同方式的研究重点是降低成本、提高效率。
2020年3月,新加坡科技设计大学、莫拉图瓦大学和南洋理工大学的研究人员开发了一种协同同步定位与构图技术,该技术利用低成本和低计算量的传感器,借助现代建筑物通常具有Wi-Fi网络覆盖实现导航。2020年5月,德国Weimar Bauhaus大学的研究者通过改进多射线跳跃技术将导航对象分为两个分布式团队,提高了协同导航效率。
NO.3
导航技术未来发展方向分析
3.1深海导航技术不断深入发展
深海感知、导航技术的发展具有较大发展空间。未来,结合光学陀螺仪、无线电罗盘、声呐等多学科导航技术的深海导航将成为重点关注领域。
DARPA启动于2019年的垂钓者(Angler)项目旨在研发水下机器人系统,这些机器人可在黑暗、湍流海况下执行搜索、维修等任务,其关键技术挑战包括高分辨率传感技术、未知参数物体的感知和操纵策略,以及长时间自主控制方法。2020年,该项目从设计阶段进入测试阶段,其机器人子系统在实验室和仿真环境中进行测试。该项目预期在2021年在具有代表性的海洋环境中完成机器人集成系统的封装测试。
3.2人工智能技术在导航系统中将占据重要地位
未来,以人工智能为核心、智能传感器系统为先导的智能导航技术将为航空航天、兵器船舶等提供更加便利的导航定位选择。智能导航的研究领域主要包括智能感知和智能辅助决策算法。
技术应用方面,智能导航在感知方面分成语音和视觉两个方向。2020年初,TNAV公司扩大与亚马逊合作,能够实现通过Alexa语音进行导航,在接收质量差或没有信号的地方为驾驶员提供了智能导航。2020年4月,韩国最大的造船厂现代重工集团宣布,已成功在25t散货船上安装了现代智能导航辅助系统(HiNAS)。智能感知方面,仍需重点突破精确感知机理、点云无缝融合等关键技术。
公司人事调动方面,2020年1月,BAE系统公司任命Ravi Ravichandran博士为公司情报与安全部门的副总裁兼首席技术官,将专注于扩展在人工智能/机器学习、云计算、数据分析、企业IT现代化和系统维护方面的前沿技术。这一任命体现了BAE公司对前沿技术辅助导航系统未来应用的提前布局。
3.3室内导航技术应用不断普及
在未来,智能城市的实现离不开室内导航技术的辅助,室内导航定位技术的应用将随着其重要性的提高而逐渐得到普及。发展精度性高、成本低、普适性的室内导航定位技术始终是国外研究的重点与难点。
2020年8月,印度基础设施技术研究与管理研究所提出了一种基于接收信号强度指数(RSSI)的机器人定位、路径规划和计算机视觉决策系统,采用的无线局域网发射设备具有固定的发射功率,接收端根据周围环境得到不同的信号强度值。该方法每1.6m测量3个固定发射单元的RSSI值,并通过分类器进行分析,实现机器人在室内区域的定位。导航完成后,机器人分别利用目标识别和基于人脸识别的分类方法对目标进行分析。
2020年8月,德国德累斯顿工业大学提出了基于粒子滤波的四锚节点三维时差定位方法,研究了基于四锚点到达时差(TDoA)的粒子滤波三维定位问题。所实现的粒子滤波器使用1000个粒子来表示感兴趣的概率密度函数。在预测步骤中,使用重采样过程生成粒子,TDoA测量用于确定每个粒子的权重,以更新后验概率密度函数和估计目标节点的位置。
3.4微小飞行器导航技术向自主化、智能化发展
微小型飞行器的飞行环境主要集中于几百米之内的低空室外环境以及复杂的室内环境。在室内环境下,物品摆放使得结构布局复杂,飞行空间不规则;在室外环境下,存在固定障碍如建筑、电线,也存在随机出现的障碍如行人、车辆等,飞行环境复杂程度进一步提高。
由于微小型飞行器的飞行环境复杂,环境感知能力、飞行安全性与可靠性是技术研发的重要内容。此外,微小型飞行器的工作场景往往使得单一的导航方式受限,高大建筑群使得卫星导航方式受限,气候发生变化,如发生温度变化,光照变化,气流扰动时,容易使接收响应信息的传感器受到影响,单一的定位导航方式难以满足其在复杂飞行环境下可靠稳定工作的需求,所以实时准确的估计微小型飞行器在复杂环境中的位姿问题是飞行器稳定工作的重要保障。
综合可见,微小型飞行器环境感知及自主导航技术是其具备自主避障,目标跟踪,路径规划等功能的重要前提,是其完成如自主侦察,环境探测等更复杂,更多样任务的重要保证,是微小型飞行器自主化,智能化的关键。
美国海军研究实验室研制出了近身隐蔽式自主一次性飞机微型无人滑翔机的最新变种蝉mk5。已经为蝉mk5开发了导航、制导和控制系统,能够实现从发射到着陆的全自动飞行。2019年11月,美国国防部美国海军研究实验室Kahn等人在《Journal of guidance, control, and dynamics》期刊上介绍了导航系统的设计,该系统利用三轴速率陀螺仪和全球定位系统接收机提供的信息来估计位置、速度、偏差修正后的体轴角速率、横摇姿态、风速和风向。该系统设计能够跟踪到预先编程的目标位置,环绕该位置运行,并在该位置执行精确着陆。论文同时介绍了控制滚转姿态和飞行轨迹角的控制器,包括用于恢复蝉mk5在空中部署期间意外旋转的技术;给出了飞行试验结果,验证了蝉mk5在飞行和精确着陆过程中的飞行剖面。
结束语
不依赖卫星的导航技术日益成为各国发展的重点。当前,世界军事大国均已基本完成卫星导航系统设施部署,且都基本具备了干扰他国卫星信号的能力。下一阶段,在不断完善卫星导航系统的同时,不依赖卫星的导航系统研发成为工作重点。由于PNT领域对于国计民生的重要意义,美国已连续发布相关领域的顶层设计规划,俄罗斯、欧盟等也纷纷启动相关项目,但项目总投入与美国差距仍然较大。
针对不同的应用领域和使用环境,以惯性导航为主,视觉导航、协同导航等辅助导航方式不断取得进展,各项性能参数不断提高,应用领域不断扩大,为飞行器、车辆等提供了导航多样化选择。量子导航、仿生导航等尚处于实验室研发阶段的导航技术产品也初露端倪,具备未来应用的巨大潜力。
原文链接:https://mp.weixin.qq.com/s/YWE03VJjjYrOQsjKlfPP8A